
EMESENT는 상업용 UAV 엑스포 2022에 출전.

네, 이것은 우리의 호버 맵입니다 St 버전 uh 이것은 우리가 온 최신 버전입니다
45도 각도로 기울어진 퍽 다운이 있는 곳이 바로 슬램입니다.
45도 각도로 기울어진 퍽 다운이 있는 곳이 바로 슬램입니다.

기반 Lidar를 사용하여 회전하면서 동시에 현지화하고 매핑합니다.

3D 환경을 수집하여 해당 환경을 사용하여 항공기를 탐색하고

GPS는 환경을 거부하므로 대부분의 항공기가 날 수 없는 장소를 채굴하는 데 정말 큰 역할을 합니다.

GPS 솔루션이 없기 때문에 실제 Lidar를 사용하여 항공기를 탐색할 수 있습니다.

제가 보여드릴 수 있는 예시가 조금 있습니다. 잘 나올지 모르겠습니다.

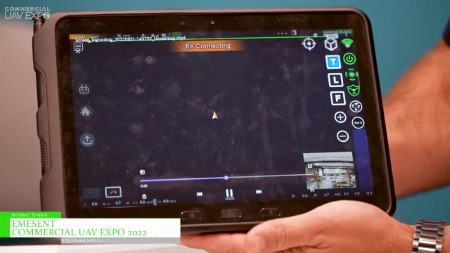
그래서 여기 우리는 GPS 거부 환경이 있는 창고에 있습니다. 호버를 시작합니다.

회전을 시작하는 매트는 우리가 타고 있는 DJI m300 플랫폼과 대화 중입니다.

우리는 솔루션을 얻고 GPS 없이 신청할 수 있습니다. 그런 다음 이륙하고 전환할 수 있습니다.

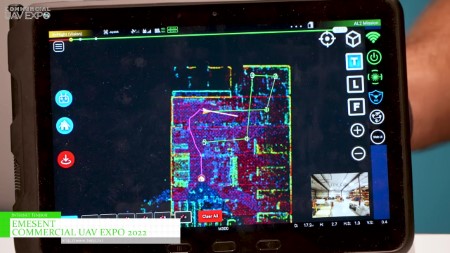
라이브 3D 포인트 클라우드로 이동하면 구축 중인 영역이 표시되기 시작합니다.

보시다시피 이것은 창고의 일부입니다. 매우 희박한 Point Cloud의 일종입니다.

지금 보고 계신 것과 비행할 장소에 대한 아이디어를 제공하기에 충분합니다. 이제 실제로 들어갈 수 있습니다.
웨이포인트를 지정하면 해당 포인트 클라우드를 탐색하고 보고 있는 위치를 확인할 수 있습니다.

따라서 항공기가 자율적으로 이 지점으로 비행할 때까지 중간 지점을 제공할 수 있습니다.

동시에 장애물을 우회하여 해당 지점에 도달하므로 여기에서
약간의 점수를 줬지만 아무데도 놓을 수 없었고 항공기가 꺼질 것입니다.
약간의 점수를 줬지만 아무데도 놓을 수 없었고 항공기가 꺼질 것입니다.

실제로 탐색 모드로 전환되므로 {101}{101}

따라서 한 번 배치하면 이 동영상에서 보기가 매우 어렵지만

천장에 매달린 여러 개의 연장 코드를 보면
항공기가 해당 지점에 도달하기 위해 주변을 탐색하는 것을 볼 수 있습니다.
항공기가 해당 지점에 도달하기 위해 주변을 탐색하는 것을 볼 수 있습니다.

첫 번째 웨이포인트를 달성하면 다음 웨이포인트로 이동합니다.

그리고 다시 빌드 중인 환경을 사용하여 최적의 경로를 찾습니다.

볼 수 있는 이 영역에 가까워지면 서로 다른 지점으로 이동합니다.

더 많은 데이터가 있기 때문에 클라우드가 더 많은 정보를 채우기 시작합니다.
그러면 다음 Waypoint를 찾기 위해 이동합니다.

그런 다음 마지막 단계로 가면 원하는 위치에 더 많은 장애물이 있을 것입니다.

그들 주위를 이동

그래서 그 시점으로 돌아가서 그 때 내가 항공기를 제어하고 다시 가져옵니다.

착륙할 위치로 스틱을 제어하지 않고도 자동 착륙할 수 있습니다.

다시 내려와 스캔을 중지한 다음 우리가 해야 할 모든 일을 다시 시작합니다.

호버 맵의 여기를 표시하면 볼 수 있습니다. 우리가 이것을 열면 하나가 있습니다.

USB 포트에 썸 드라이브를 삽입하면 사용 중인 스캔을 다운로드하기 시작합니다.

다운로드되지 않은 파일이 있으므로 내부에 500GB의 저장용량이 있으므로 모든

스캔은 삭제할 때까지 그대로 유지되지만 새 스캔이 필요할 때마다

썸 드라이브를 다운로드에 자동으로 삽입한 다음 소프트웨어로 이동하여 처리합니다.

소프트웨어의 좋은 점은 스캔하는 데 약 1.5배의 시간이 걸린다는 것입니다.
처리하기 위해 10분 비행을 하면
처리하기 위해 10분 비행을 하면

Las Laz e57로 내보낼 수 있는 전체 포인트 클라우드를 처리하고 확보하는 데 15분 uh

OBG 나는 objum이 모든 세 번째 파일에 들어가는 데 필요한 모든 파일 형식이라고 믿습니다.

파티 소프트웨어를 선택한 다음 그 시점부터 정리하여 고객에게 보냅니다.







